|
I am Research Scientist at Meta GenAI building Large Language Models. I am broadly interested in sequential decision-making problems in AI and robotics. I obtained Ph.D. in Robotics from Carnegie Mellon University, advised by Prof. David Held. My thesis research was focused on enabling robot to perform complex interactions using reinforcement learning. I have also spent time at Google DeepMind Robotics and FAIR Embodied AI.
GitHub / Google Scholar / LinkedIn / Twitter |

|
|
|
|
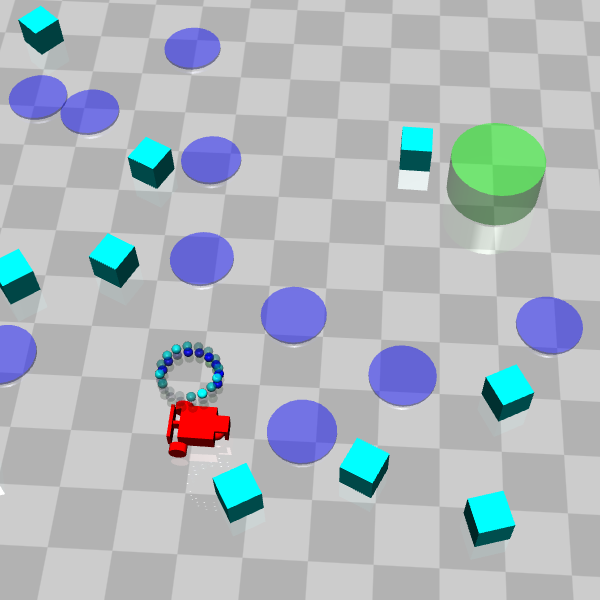
Wenxuan Zhou, Bowen Jiang, Fan Yang, Chris Paxton*, David Held* Conference of Robot Learning 2023 (Oral) We propose a spatially-grounded and temporally-abstracted action representation with a hybrid discrete-continuous reinforcement learning framework. Keywords: RL with 3D Vision, Action Representation, Contact-rich manipulation [Paper] [Code] [Website] |
|
Wenxuan Zhou, David Held Conference of Robot Learning 2022 (Oral) ICRA 2022 Workshop on Reinforcement Learning for Contact-Rich Manipulation Press Coverage: IEEE Specturm - Robots Grip Better When They Grip Smarter We present a system that applies reinforcement learning to extrinsic dexterity that solves an occluded grasping task with a simple gripper. Keywords: Contact-rich manipulation, Sim2Real [Paper] [Code] [Website] |
|
Wenxuan Zhou, Steven Bohez, Jan Humplik, Abbas Abdolmaleki, Dushyant Rao, Markus Wulfmeier, Tuomas Haarnoja, Nicolas Heess Conference on Lifelong Learning Agents (CoLLAs) 2022 We identify two challenges in robot lifelong learning with non-stationary dynamics due to off-policy data. Keywords: Lifelong Learning, Offline RL, Off-Policy RL [Paper] [Website] |
|
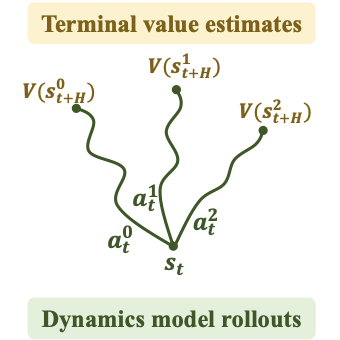
Harshit Sikchi, Wenxuan Zhou, David Held Conference of Robot Learning 2021 (Oral, Best Paper Finalist) A novel instantiation of H-step lookahead policies with a learned model and a terminal value from a model-free off-policy algorithm. Keywords: Model-Based RL, Model-Free RL [Paper] [Code] [Website] |

|
Wenxuan Zhou, Sujay Bajracharya, David Held Conference of Robot Learning 2020 (Plenary Talk) Learning policy in the latent action space to naturally avoid out-of-distribution actions. Keywords: Offline RL, Off-Policy RL, Deformable Object Manipulation [Paper] [Code] [Website] |
|
Harshit Sikchi, Wenxuan Zhou, David Held NeurIPS Deep RL Workshop 2020 Safe reinforcement learning with a Lyapunov-based barrier function. Keywords: Safe RL [Paper] [Code] |
|
Wenxuan Zhou, Lerrel Pinto, Abhinav Gupta ICLR 2019 Learning to "probe" the environment before task execution. Keywords: System Identification, Multi-Task RL [Paper][Code] |
|
Last update: Mar 2024
|